


Volume 29, No.1 Pages 19 - 27
2. ビームライン・加速器/BEAMLINES•ACCELERATORS
実験制御用プログラム開発のモダン化とビームライン制御・データ収集・オンライン解析プラットフォーム:BL-774
Beamline control, data acquisition and online analysis platform, BL-774, for modernization of program development for beamline experiment control
[1](国)理化学研究所 放射光科学研究センター RIKEN, SPring-8 Center、[2](公財)高輝度光科学研究センター ビームライン技術推進室 Beamline Division, Center for Synchrotron Radiation Research, JASRI、[3](公財)高輝度光科学研究センター 回折・散乱推進室 Diffraction and Scattering Division, Center for Synchrotron Radiation Research, JASRI、[4](公財)高輝度光科学研究センター XFEL利用研究推進室 XFEL Utilization Division, Center for Synchrotron Radiation Research, JASRI
- Abstract
- SPring-8/SACLAにおいて開発と導入が進められてきた「ビームライン制御・データ収集・オンライン解析プラットフォーム:BL-774」は、2023年夏の時点で、SPring-8の5つのビームラインにおいて、光学機器の制御を含めたユーザー共用が行われている。ビームラインにおけるBL-774のシステム構成は、ネットワークの接続を含めてビームライン毎に完結的である。本稿では、特に実験制御用プログラムの作成・開発のあり方に着目し、現代に相応しいソフトウェア開発のコンセプトと、そのコンセプトを実現していくBL-774の基幹的なソフトウェア・システム「774 Basic System」を紹介する。774 Basic Systemは、実験制御用プログラムの作成段階ではロジックに関わる部分に注力できるよう、周辺のパーツがビームラインでの実験に適切な形、機能、規模で実装されていて、利用形態に沿って選択可能な複数のマイクロサービスとして提供される。今後、機能の拡張を図るとともに幅広いビームラインでの導入が進められていく見通しである。
1. はじめに
SPring-8では、そのアップグレード・プロジェクトであるSPring-8-IIプロジェクト[1, 2][1] H. Tanaka: Synchrotron Radiat. News 27 (2014) 23-26.
[2] T. Watanabe and H. Tanaka: Synchrotron Radiat. News 36 (2023) 3-6.の計画が進められているところであり、光源性能の利点に対して最大限の活用を加速するために、光源だけではなく、光学系、試料準備、2次元検出器、データ解析、実験制御システムなどのビームライン・コンポーネントに対するアップグレードも進められている。その中で、SPring-8-IIのビームラインに求められる機能には、(i)システムの堅牢性と柔軟性、(ii)コンフィグレーション管理、(iii)実験ワークフローのシーケンス管理、(iv)リモート制御、(v)最大1メガ・サンプル/秒(MSPS)の高速データ収集に関する項目を挙げることができる。それぞれの目的を達成するための個々のタスクは、項目を越えて互いに密接に関連しているため、迅速性に加えて一貫性を持って統合されていく必要がある。そのため、著者らは「ビームライン制御・データ収集・オンライン解析プラットフォーム:BL-774」[3, 4][3] K. Nakajima et al.: J. Phys.: Conf. Ser. 2380 (2022) 012101.
[4] K. Motomura et al.: Synchrotron Radiat. News, Published online: 13 Dec 2023, doi: 10.1080/08940886.2023.2277638.の開発と導入を進めてきた。
ここでBL-774の名称についてであるが、日本語では、語呂合わせで「774」に"nanashi"と音を当てはめている。これは「名無し」に由来し、命名時に、このプラットフォームが持つ機能の範囲を示す概念に対して、特定の一語をあてはめることが困難であったことに関係している。なお、英語での気の利いた読み方は今後、決める予定である。
さて、BL-774では、これまでに、(i)、(ii)、(iv)の3つの機能を実装している。BL-774の(i)、(ii)の機能を用いることで、新しいハードウェアあるいはソフトウェアの開発者は、実際のビームライン環境を使って開発や試験、運用への組み込みを行うためのワークフローを利用することができる。このワークフローは、専用のラピッド・アプリケーション・デベロップメント(RAD)とWebベースのグラフィカル・ユーザー・インターフェース(GUI)に象徴される2フェーズ開発が組み込まれたものである。ここで、このワークフローを、本稿の第3章「BL-774のソフトウェア・システム」の内容に沿ってあらかじめ概観しておくことにする。本稿で紹介するBL-774のソフトウェア・システム「774 Basic System」[5][5] 774portable (https://bl774-repo01.usr.common.sp8int.jp/pub/774portable、2023年11月22日閲覧、SPring-8施設内での公開).は、プログラミング言語であるPython[6][6] Python (https://www.python.org、2023年11月22日閲覧).の実行環境などと一括してPC等に構築される。この際に、パルスモーター・コントローラーや2結晶分光器(DCM)など、ビームラインで標準的に使用される機器の制御を扱う「ecpy」という名前のソフトウェア・モジュールがあらかじめ組み込まれる。このecpyは、774 Basic Systemが持つクラス・ライブラリ「774 API」を構成する一つである。API(Application Programming Interface)については、この章の後半で再び扱うことにする。したがって、774 Basic Systemの利用者は、Python環境で、ecpyをインポートすれば774 APIの利用を開始できる。BL-774のRAD環境は、JupyterLab[7][7] Jupyter (https://jupyter.org、2023年11月22日閲覧).などのWebベースの対話型実行環境を含め、Pythonの開発に用いられるインターフェースでecpyをインポートすることにより、774 APIを直接的に利用できる環境である。そこで、2フェーズ開発の最初のステップとして、ハードウェアの開発者は、ビームラインに新しい機器を設置した後に行う初期検査や、それらを使用した初期実験を、BL-774のRAD環境を用いて実行できる。ここでの主目的は、開発中の機器における操作手順や取得した値の演算方法のような、結果を得るまでの具体的な処理の流れを規定するロジックを作成したり、それらの中で用いられる変数を決定したりすることである。これらのロジックや変数は、ノートブック形式のファイルなどに保存され、必要に応じて他の資料と共に、ソフトウェアの開発者と共有される。次のステップでは、前のステップで作成されている、プログラミング言語で記述されたロジックを基に、ソフトウェアの開発者が堅牢性も考慮したソフトウェアを作成し、公式のAPIあるいはWeb GUIとしてビームラインにリリースしていく。ここでは、特にソフトウェア開発の観点で重要な、エラー処理やカプセル化が追加されたスクリプトが作成される。さらに、これらのスクリプトを利用してWeb GUIのアプリケーションが作成される。このワークフローを経ることにより、利用者は、Web GUIを使用して機器の基本操作を実行できるだけでなく、APIそのものの利用においても、さまざまな可変パラメーターをWebインターフェースを使用して設定できるようになる。さらに、これらのWeb GUIと対話型実行環境等を組み合わせて使用することで、さまざまな研究開発プロジェクトを迅速かつ簡単に実行できるようになる。これは、新しい機器の導入時だけではなく、実験準備やデータ収集においても当てはまることであり、本稿のテーマである実験制御用プログラムの作成・開発においても同様である。また、本稿では詳細に触れないが、BL-774の(iv)の機能を用いることにより、SPring-8においてリモート制御を行う際に運用面で必要とされている安全に関する基準を標準的に満たすことが可能になる。
ところで、放射光ビームラインで行われる制御には、互いに関連がありながら異なる側面を持つものとして、ビームライン機器制御と実験機器制御を挙げることができる[8][8] 大橋治彦、平野馨一編: 改訂版・放射光ビームライン光学技術入門, 日本放射光学会 (2019).。前者は、主にフロントエンド(FE)や輸送チャネル(TC)において光を操作することを主目的とする機器に対する制御であり、常設的で共同利用性の高いものと位置づけられる。一方で、後者は、実験ハッチ内の試料ステージや検出器を操作することを主目的とする。これは、前者の間接的な操作を含めて、実験に必要な操作を統合して扱うものであり、常設的な機器のみで構成される場合もあれば、一時的な持ち込み機器を含めて構成される場合もある。774 Basic Systemは、複数のビームラインにおいて前者および、後者の中の制御目的で標準的に多用される機器の操作を対象とし、後で述べるコンセプトに基づいたソフトウェアの実装を行ってきたものである。さらに、ビームライン制御のためのフレームワークに普遍的に望まれる形態として、再利用性に優れたAPI群の整備やエコシステムによる供給様式を挙げることができる[8][8] 大橋治彦、平野馨一編: 改訂版・放射光ビームライン光学技術入門, 日本放射光学会 (2019).。「API(Application Programming Interface)」という用語は既に前で使用しているが、その定義は文脈に応じて広狭がある。ここでは、「他のソフトウェアに特定のサービスを提供する明確に定義されたインターフェース」[9][9] M. Reddy: API Design for C++, Morgan Kaufmann (2011).としておく。また、「エコシステム(ecosystem)」は、本来は「生態系」を意味する言葉であるが、その、互いに独立している多様な構成要素が相互に依存しあい連携しながら1つの大きなシステムを形成する様を表す使い方で、さまざまな分野において利用されている。例えば、「地域経済エコシステム」や「ビジネス・エコシステム」、「イノベーション・エコシステム」といった言葉をお聞きになったことのある読者もおられるかもしれない。ITやソフトウェア・システムの分野でエコシステムという言葉が利用される場合、そこでは、「ソフトウェアの再利用が大きな特徴であり、『全てを自分で作らず、使えるものは使い、車輪の再発明はしない』が基本的な考え方」[8][8] 大橋治彦、平野馨一編: 改訂版・放射光ビームライン光学技術入門, 日本放射光学会 (2019).に基づいて、システムが構築されていくことになる。なお、この「車輪の再発明」もまた、ITやソフトウェア・システムの分野だけでなく、さまざまな分野でしばしば目にする比喩表現であろう。774 Basic Systemは、これらのAPIやエコシステムの概念も実現している。
さて、この後に述べるように、BL-774にはいくつかの利用形態が存在するのであるが、本稿を執筆している2023年夏の時点で、主に光学機器の制御に適用し、ユーザー共用を行っているビームラインには、BL20B2[10][10] 上杉健太郎、星野真人: SPring-8/SACLA利用者情報 26 (2021) 448-449.、BL09XU[11][11] A. Yasui et al.: J. Synchrotron Rad. 30 (2023) 1013-1022.、BL13XU[12][12] 隅谷 和嗣 他: SPring-8/SACLA利用者情報 27 (2022) 274-279.、BL46XU[13][13] 安野聡、ソ オッキュン、高木康多、保井晃: SPring-8/SACLA利用者情報 28 (2023) 434-438.、BL07LSUがある。今後、適用範囲を拡大するとともにその他のビームラインでも導入が進められていく見通しである。
本稿では、まず、ビームラインのネットワークから見たBL-774の位置づけと、BL-774のソフトウェア・システムの仕組みを、ビームライン実験の担当者や利用者の方々と共有できるよう紹介する※1。その上で、BL-774のサンプル・コードの実例を用いて、実用的なプログラミングへの展望についても触れることにしたい。
※1本稿では、774 Basic Systemについて執筆時(2023年夏)の最新バージョン(Summer 2023 Version)に基づいて記述している。今後のアップデートに伴い仕様の変更や追加等の可能性があるため、774 Basic Systemを実際に利用する場合には、対応するバージョンに関する情報も併せて参照していただくことを推奨する。
2. ビームラインにおけるBL-774のシステム構成
ビームライン制御で対象となる被制御機器の数はビームラインあたり100個程度が目安である。通常、これらの機器の詳細はそのビームラインの担当者が把握している。また、特に実験ハッチでは、ユーザータイム中において機器の新規追加や移動、入れ替え等の必要が実験に応じて頻繁に発生する。そこで、BL-774では、既存の(加速器制御)システムと違って、システムの基本構成をビームライン単位で完結させた。この規模にシステムを集約したことで、適切な設計と実装が図られた。
BL-774をビームラインへ導入するには、2021年度以降にビームライン単位で段階的に導入が進められている「ビームラインネットワーク」と呼ばれる新しいネットワークと併せて導入することが標準形である。図1は、ビームラインで扱われる機器を操作するためのネットワーク接続とビームライン制御が、ビームラインネットワークとBL-774の導入前後でどのように変化するのかを、対象となる機器のまとまりごとに示している。なお、ここでは基本的な考え方を示すために、ビームラインのネットワークの一部を切り出し、想定される事例を簡略化して図示した。
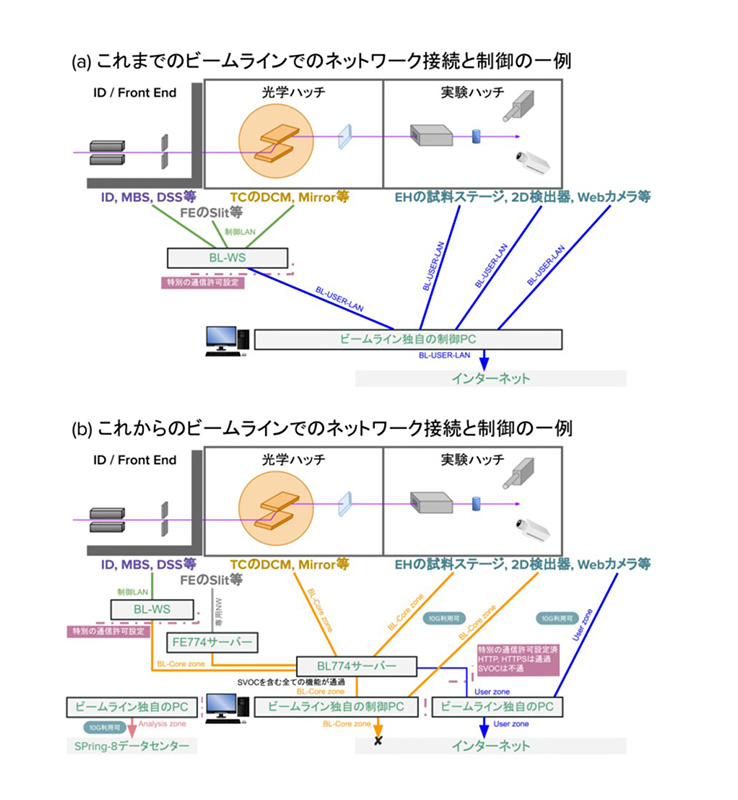
図1 ビームラインで扱う機器に対するネットワーク接続とビームライン制御の(a)これまでと(b)これから。
まず、図1(a)は、従来のビームラインのネットワーク接続と制御の経路を示す。蓄積リングやフロントエンド、光学ハッチには、挿入光源(ID)、メイン・ビーム・シャッター(MBS)、ダウン・ストリーム・シャッター(DSS)、DCM、ミラー等の装置があり、実験ホール内の実験ステーション等には、ビームライン制御に用いられるPCが置かれている。ビームラインのPCから、これらの装置を操作する場合には、制御に関するソフトウェアを受け持つ「ビームライン・ワークステーション(BL-WS)」[14, 15][14] 大端通: SPring-8/SACLA利用者情報 2 (1997) 15-17.
[15] 古川行人、松本崇博、石井美保: SPring-8/SACLA利用者情報 19 (2014) 392-395.が介在してきた。このためビームラインで標準的に使用されているネットワーク「BL-USER-LAN」に接続されたPCから、「制御LAN」に接続されたBL-WSに通信するためには、ネットワーク間の特別な通信許可が必要である。多くの場合で、ビームライン制御に用いるPCには、既に通信許可が与えられているIPアドレスを使用する方法が取られてきた。一方、実験ハッチで使われる試料ステージ、2次元検出器、Webカメラを制御するには、やはりBL-USER-LANを用いたネットワーク接続か、独自のローカルLANを用いたネットワーク構成を用いてきた。
図1(b)では、BL-774を、ビームラインネットワークと併せて導入した際の、ネットワーク接続を示している。IDやMBS、DSSについては、従来通り、BL-WS内のソフトウェアの機能を利用するものの、ビームラインのPCとBL-WSの通信は「774サーバー」と呼ばれる774 Basic Systemがインストールされた計算機が中継する。一方、主にTCに配置されている光学機器、および、FEに配置されているスリット等の機器については、774サーバー上のソフトウェアが通信接続と制御を直接的に受け持つ。
ビームライン機器のためのソフトウェア開発の観点から見れば、この構成は、ビームライン制御としてのまとまりをより意識したものである。なぜならば、ビームラインのPCと774サーバーは、共に同じ「BL-core Zone」※2と呼ばれるネットワーク上に存在し、ビームラインのPCが774サーバーと通信するための特別な通信許可設定は不要となるからである。BL-774の導入時に標準的に設置される774サーバーには、BL-WSと通信するための通信許可設定が既定として設定されることになっているため、ビームライン担当者がこの申請を改めて行う必要はない。
また、実験ハッチ内の機器に対するネットワーク接続については、複数の経路が利用できる。例えば、試料ステージの駆動に用いるパルスモーター・コントローラーなど、774サーバーが標準的にサポートする機器は、BL-core Zoneに接続したうえで、774サーバーのソフトウェアが制御を受け持つことができる。この場合には、光学機器と試料ステージ等が同一の774サーバーによって制御される構成になることから、両者の動作を複合的に組み合わせるスキャン測定のような制御のためのソフトウェアも、ビームラインの範疇において、より簡潔に構築できるようになることも特筆すべき点である。
それに対して、専用のフレーム・グラバー・ボードを用いる2次元検出器など、774サーバーが標準的にサポートしていない機器は、774サーバー以外のPCが直接の制御を受け持つことになる。なお、詳細は省くが、ビームラインネットワークでは、BL-core Zoneのほかに、「User Zone」と「Analysis Zone」と呼ばれるネットワークも利用することができるようになる。
※2このゾーン名称は本稿の執筆時の仮称であるが、2023年度中に確定する見込みである。
3. BL-774のソフトウェア・システム
実験計測用プログラムの作成は、その時代のプログラム開発の流行り廃りを色濃く反映するものであり、近年では、プログラムをスクラッチで一から全て作り上げる必要は少なくなっている。その背景には、Docker[16][16] Docker (https://www.docker.com、2023年11月22日閲覧).など、仮想環境において既存のソフトウェアを配置、実行する仕組みの普及が挙げられる。Dockerについては、この章の「BL-774とエコシステム」の中で改めて触れることにする。また、数値演算ライブラリでも自らスクラッチで用意するよりWebサイトからインストールして利用できることが多い。最近では、コードの生成をサポートする生成AI[17][17] ChatGPT (https://chat.openai.com、2023年11月22日閲覧).が、その急速な進化に伴いホットな話題となっている。このため、例えば実験計測用のGUIアプリケーションの作成でも、様々なGUIのフレームワークが既に利用でき、相対的に比重が大きくなるのは、第1章でも述べたように、各ビームラインに特有のソフトウェアを使って実現したい目的に対して、ロジックとなる部分のプログラム化である。
このように、ソフトウェアの取扱いがより柔軟なものに進化していることを踏まえ、BL-774は、プログラミング全般にわたる学習コストを抑制した上で、ロジックに関わる部分のプログラム作成に注力できる仕組みを構築してきた。
774 Basic Systemの実装に使用しているプログラミング言語は基本的にPythonであり、現在の典型的な動作環境はLinux (Ubuntu)[18][18] Ubuntu (https://ubuntu.com、2023年11月22日閲覧).とPython (>=3.8)である。Python本体のバージョンは継続的にアップデートされるので、BL-774のソフトウェア・アップデートも数年ごとにこれを追随している。この際、過去に対応していた機器は継続して利用できるように構築している。
774 Basic Systemの構成要素については、文献[3, 4]等があり、以下ではごく簡単に述べる。
対象機器とCommunication service
対象とする被制御機器は、ビームラインで広く使われる、パルスモーター・コントローラーに代表される、イーサネット・インターフェースを有するものであり、アクセス頻度が10 Hz程度の機器である。
774 Basic Systemにおいて被制御機器との接続・通信を仲立ちするプロセスとして「Communication service」と呼ばれるものがある。これは機器(通信インターフェース)ごとに1プロセスを起動させる。複数のプロセスやPCからの通信の制御や制限を行う機能も実装される。
774 API
774 APIは、Pythonで記述された774 Basic Systemのクラス・ライブラリである。Ecpy(Experiment Control API)はその構成要素の一つで、ロジックの開発に用いるためのAPI環境を提供する。Ecpyは、ソフトウェア動作のステップごとに整理された階層構造を持ち、それらには「Device layer」や「Object layer」と呼ばれるものがある。また、ecpyのメソッドは、非同期動作の簡潔な記述として、asyncio[19][19] asyncio (https://docs.python.org/ja/3/library/asyncio.html、2023年11月22日閲覧).の実装形式であるコルーチン関数として記述されている。
パラメーターの扱いと774 ConfigDB
ConfigDBは、システムにおけるパラメーター設定ファイルの氾濫を避け、パラメーターの一元管理を図り、登録・閲覧・変更の容易なコンフィグレーション・システムを提供する。これにはビームラインの担当者やユーザーが扱うパラメーターも含まれる。このデータベースにはMariaDB[20][20] MariaDB (https://mariadb.org、2023年11月22日閲覧).を使用し、入出力には専用のPython API(cfpy)が作成されている。データの閲覧・編集には専用のWebフォームを備える。
ユーザー・インターフェースと774 Service
774 APIは、774 Basic Systemの環境が構築されたPC上のPython開発インターフェースにおいてecpyをインポートすることで直接的に利用できる。例えば、JupyterLabや統合開発環境上でのアプリケーション開発が該当する。これに加えて、774 APIを実行する利便性を補完するために、Web GUIの形態によるインターフェースを一定の範囲で提供している。機器の基本的な操作や、システムに必要な設定や内部プロセスの立ち上げ等は基本的にWeb GUIから行うことができる。これらのアプリケーション群は、必要に応じて選択的にアップデートや水平展開をすることができるように、それぞれが独立性に富んだマイクロサービスの形態で構築されている。その他、ConfigDBに対するWebインターフェース(図2)や、774 Basic Systemに対するリモート操作のためのプロトコル等も用意している。
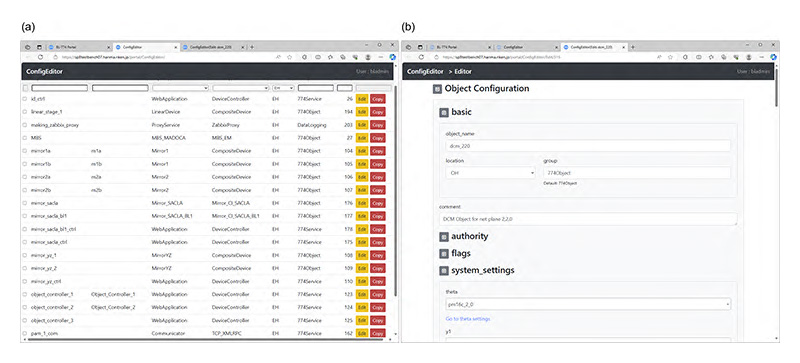
図2 ConfigDBのWebインターフェース。(a)オブジェクトの一覧画面と、(b)編集画面の例。
BL-774とエコシステム
774 Basic Systemのビームライン等の利用環境への水平展開を考える時、スケーラビリティや、各ビームラインに存在している多様なOSやそれに基づくアプリケーション群との両立に関する課題がある。ここで、「スケーラビリティ(scalability)」も、さまざまな文脈で使用される言葉であろう。ITやソフトウェア・システムにおいて用いられる場合には、「運用上のある次元での増大に対応するソフトウェア・システムの能力」[21][21] I. Gorton: Foundations of Scalable Systems, O'Reilly Media, Inc. (2022).として定義できる。ここでの運用上の次元とは、「システムが同時に処理できるユーザーや外部からのリクエストの数」や「システムが有効に処理と管理ができるデータの量」[21][21] I. Gorton: Foundations of Scalable Systems, O'Reilly Media, Inc. (2022).などが挙げられる。そこで、774 Basic Systemにおいても、利用環境におけるソフトウェア・システムのインストールやアップデート等のソフトウェア・デプロイメントに関わる作業を再現性よく行うため、Dockerと呼ばれるコンテナ型仮想化のためのオープン・プラットフォームを利用している。「コンテナ(container)」は、本来は物流輸送で用いられる容器を意味する言葉であるが、ITやソフトウェア・システムの分野においては、そのメタファーで、「アプリケーションとその依存関係をカプセル化したもの」[22][22] A. Mouat: Using Docker, O'Reilly Media, Inc. (2016).を表す用語として使われている。このコンテナに基づく仮想化技術がコンテナ型仮想化と呼ばれるものであり、この他に、いわゆる仮想マシン(Virtual Machine、VM)に基づく仮想化技術が知られている。この2つのアプローチは本質的に異なる特徴を持ち、「コンテナの目的はアプリケーションを移植可能で自己完結型にすること」であり、「VMの目的は外部環境を完全にエミュレートすること」[22][22] A. Mouat: Using Docker, O'Reilly Media, Inc. (2016).と捉えることができる。さらに、コンテナは、ホストOSとリソースを共有して使用することから効率が大幅に向上し、起動や停止に要する時間も短縮されている。このことから、ユーザーは、コンフィグレーションやインストールの問題に時間を費やしたり、システムに必要な変更を心配したりすることなく、複雑なアプリケーションをダウンロードして実行できるし、開発者は、ユーザー環境の違いや依存関係の可用性について心配する必要がなくなる、という利点[22][22] A. Mouat: Using Docker, O'Reilly Media, Inc. (2016).がある。「依存関係の可用性(availability of dependencies)」とは、ここでは、そのアプリケーションが依存関係を持つコンポーネントがどの程度、安定して持続的に動作するかという度合いを示すものと解釈できる。そして、Docker[16][16] Docker (https://www.docker.com、2023年11月22日閲覧).は、同名の企業によって開発、公開されている、コンテナ型仮想化環境を提供するオープン・ソース・ソフトウェアである。Dockerの仕組みでは、Dockerコンテナ・イメージ[16][16] Docker (https://www.docker.com、2023年11月22日閲覧).と呼ばれる、「コード、ランタイム、システム・ツール、システム・ライブラリ、設定など、アプリケーションの実行に必要なすべてのものを含む、軽量でスタンドアロンの実行可能なソフトウェア・パッケージ」があり、これがDockerエンジン[16][16] Docker (https://www.docker.com、2023年11月22日閲覧).と呼ばれるコンポーネントで実行されることにより、Dockerコンテナとして機能することになる。また、Dockerコンテナを生成、実行するために、Docker Compose[23][23] Docker Compose (https://docs.docker.com/compose/、2023年12月30日閲覧).と呼ばれる、ツール、コマンド体系もDockerから提供されている。774 Basic Systemでは、Dockerコンテナの持つ利点を活かし、774 Basic Systemのサービスや、事前にカスタマイズした環境を供給する手段としてコンテナを利用していて、例えば、「774 Software Development Environment(774 SDE)」や、「774 Portable system(774 Portable)」と呼ばれるコンテナ環境を用意している。
4. BL-774のサンプル・コード
リスト1に、BL-774のecpyを用いた実験計測用プログラムのサンプル・コードを掲載する。ここでは紙面の都合上、デモ的なコードにとどめるが、実践的なサンプル・コードについては順次、BL-774のWebサイトで公開していく予定である。また、リスト1のサンプル・コードを実行した時に得られる出力は、リスト2に示すようなものになる。
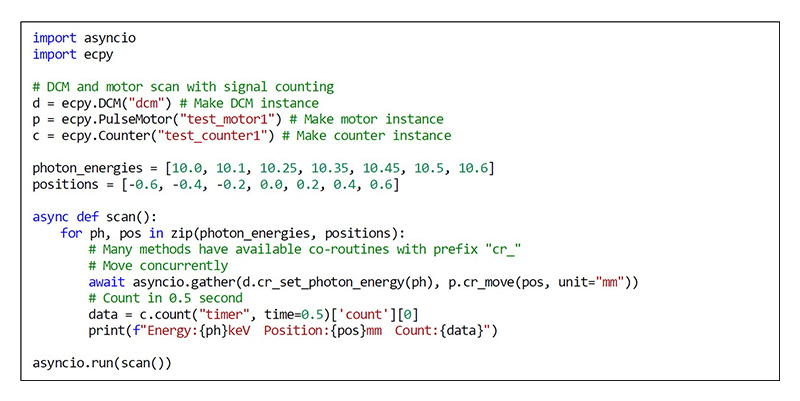
リスト1 BL-774のecpyを用いたサンプル・コード。
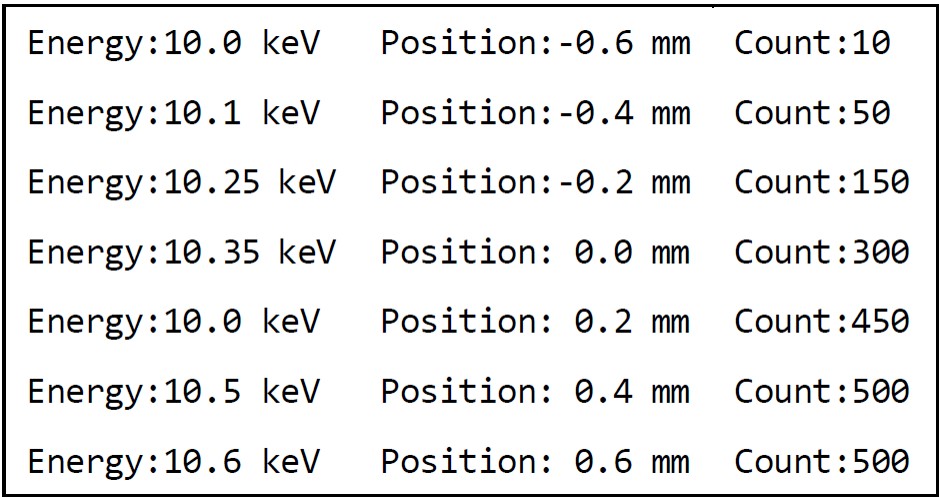
リスト2 リスト1の実行結果の例。
リスト1の特徴は、BL-774が推奨しているasyncio[19][19] asyncio (https://docs.python.org/ja/3/library/asyncio.html、2023年11月22日閲覧).形式のコーディングになっていることである。Ecpyは、機器制御の並行処理[24][24] 例えば、B. Barney: Introduction to Parallel Computing Tutorial, Lawrence Livermore National Laboratory (https://hpc.llnl.gov/documentation/tutorials/introduction-parallel-computing-tutorial、2023年11月22日閲覧).を扱うコードの実装に、非同期I/Oを実現するPythonライブラリasyncioを利用している。ここで並行処理とは、プロセッサが1つだけであるか複数であるかによらず、計算資源全体として効率的な処理の実現を図る技法である。I/Oは、ファイルの読み書き、データベースへの接続、ネットワーク通信などのシステムの入出力を意味する。ビームラインの機器制御の場合では、例えばフライ・スキャンにおいて可動軸の駆動中に他の計測機器へのアクセスを行う際などに、I/Oが全体の処理時間を支配する状況が発生しうる。そこで非同期I/Oでは、1つの処理フローの中で入出力の処理を開始した後に、その終了を待ち続けるだけでなく、待ち時間中に別の処理の実行を進める。一般に、非同期I/Oを実現するためのコーディングは煩雑でありスキルが必要とされる。そのためライブラリや構文によって簡潔にコーディングするための方法がさまざまなプログラミング言語において用意されている。リスト1も、asyncioを用いたアプリケーションのコーディングで推奨されているasync/await構文を用いて書かれたものである。また、ここで呼び出しているecpyのメソッド自体も、非同期処理として実行できるように実装されている。
なお、リスト1で使用しているecpyのDCMクラスには、DCMを制御するための基本的な機能のみが実装されている。ビームラインによっては、さらに複合的な操作、例えば、DCMのΔθ1をピエゾで制御し、光強度のスキャン測定の結果を用いてさらに微調整を加えることも行われている。この場合でも、774 Basic Systemのソフトウェア開発環境を用いれば、ecpyのDCM用のクラスを継承した上で、ピーク・サーチの結果からΔθ1の微調整を加えるロジック部分の記述に着手しやすい。このように、ecpyが直接サポートしていない機能であっても、ecpyの基本的な機能を利用しながら、そのビームライン固有のロジックを扱うプログラムの作成に注力できるならば、BL-774のコンセプトの実現に近づいていると言うことができるだろう。
5. まとめ
BL-774の基幹的なソフトウェア・システム774 Basic Systemについて紹介した。実験制御用プログラムの作成段階では、ロジックに関わる部分に注力できるよう、周辺のパーツがビームラインでの実験に適切な形、機能、規模で実装されていて、利用形態に沿って選択可能な複数のマイクロサービスとして提供されていることを紹介した。
本稿では記載しきれなかったが、BL-774では、ビームライン制御以外にも、データ収集などにおいてビームラインに関わる他のテーマにも取り組んでいる。また、BL-774は、2次元検出器システムやSPring-8データセンターなど、現在SPring-8/SACLAで開発中の他のシステムとシームレスに統合する予定にもなっている。BL-774を施設内の他のインフラと併せて導入することで、オンライン・データ解析に基づくフィードバック運用やビームライン外からの遠隔運用など、より高度な実験運用に対する期待が高まるであろう。今後のBL-774の発展にぜひご期待いただきたいとともに、関心を持たれた方は774 Basic Systemのコンテナ・イメージをダウンロードし触れてみていただきたい。
なお、本稿はソフトウェア・システムやプログラム開発に関する内容の都合上、いくつかのIT用語を用いた。編集委員会の意向も踏まえて、本文中で説明を試みた箇所もあるが、十分ではないかもしれない。そこでも触れたように、これらのIT用語は、既存の表現のメタファーであったり、文脈に応じて幅のある定義がなされたりする場合がある。また、技術の変遷とともに意味づけが変化していくこともある。気になられた用語については、本稿の記述にとらわれることなく、各種文献やインターネット等を通して理解を深められることを希望する。最近、話題の生成AIに聞いてみることも面白いかもしれない。もし、本稿に関心をもたれた方が、ビームライン制御への興味を深めていただくきっかけになることができれば望外の喜びである。
謝辞
BL-774の開発と導入にあたり、SPring-8/SACLAのビームライン関係者、理化学研究所のエンジニアリング・チームメンバーには多くのご助言、ご協力をいただきました。厚く御礼申し上げます。
参考文献
[1] H. Tanaka: Synchrotron Radiat. News 27 (2014) 23-26.
[2] T. Watanabe and H. Tanaka: Synchrotron Radiat. News 36 (2023) 3-6.
[3] K. Nakajima et al.: J. Phys.: Conf. Ser. 2380 (2022) 012101.
[4] K. Motomura et al.: Synchrotron Radiat. News, Published online: 13 Dec 2023, doi: 10.1080/08940886.2023.2277638.
[5] 774portable (https://bl774-repo01.usr.common.sp8int.jp/pub/774portable、2023年11月22日閲覧、SPring-8施設内での公開).
[6] Python (https://www.python.org、2023年11月22日閲覧).
[7] Jupyter (https://jupyter.org、2023年11月22日閲覧).
[8] 大橋治彦、平野馨一編: 改訂版・放射光ビームライン光学技術入門, 日本放射光学会 (2019).
[9] M. Reddy: API Design for C++, Morgan Kaufmann (2011).
[10] 上杉健太郎、星野真人: SPring-8/SACLA利用者情報 26 (2021) 448-449.
[11] A. Yasui et al.: J. Synchrotron Rad. 30 (2023) 1013-1022.
[12] 隅谷 和嗣 他: SPring-8/SACLA利用者情報 27 (2022) 274-279.
[13] 安野聡、ソ オッキュン、高木康多、保井晃: SPring-8/SACLA利用者情報 28 (2023) 434-438.
[14] 大端通: SPring-8/SACLA利用者情報 2 (1997) 15-17.
[15] 古川行人、松本崇博、石井美保: SPring-8/SACLA利用者情報 19 (2014) 392-395.
[16] Docker (https://www.docker.com、2023年11月22日閲覧).
[17] ChatGPT (https://chat.openai.com、2023年11月22日閲覧).
[18] Ubuntu (https://ubuntu.com、2023年11月22日閲覧).
[19] asyncio (https://docs.python.org/ja/3/library/asyncio.html、2023年11月22日閲覧).
[20] MariaDB (https://mariadb.org、2023年11月22日閲覧).
[21] I. Gorton: Foundations of Scalable Systems, O'Reilly Media, Inc. (2022).
[22] A. Mouat: Using Docker, O'Reilly Media, Inc. (2016).
[23] Docker Compose (https://docs.docker.com/compose/、2023年12月30日閲覧).
[24] 例えば、B. Barney: Introduction to Parallel Computing Tutorial, Lawrence Livermore National Laboratory (https://hpc.llnl.gov/documentation/tutorials/introduction-parallel-computing-tutorial、2023年11月22日閲覧).
(国)理化学研究所 放射光科学研究センター
〒679-5148 兵庫県佐用郡佐用町光都1-1-1
TEL : 050-3502-6167
e-mail : motomura@spring8.or.jp
(公財)高輝度光科学研究センター ビームライン技術推進室
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0831
e-mail : nyasuda@spring8.or.jp
(公財)高輝度光科学研究センター 回折・散乱推進室
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
(国)理化学研究所 放射光科学研究センター
〒679-5148 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0833
e-mail : imai@spring8.or.jp
(公財)高輝度光科学研究センター XFEL利用研究推進室
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
(国)理化学研究所 放射光科学研究センター
〒679-5148 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0992
e-mail : kyo.nakajima@spring8.or.jp
(公財)高輝度光科学研究センター XFEL利用研究推進室
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
(国)理化学研究所 放射光科学研究センター
〒679-5148 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0992
e-mail : joti@spring8.or.jp




