


Volume 27, No.2 Pages 103 - 106
2. ビームライン/BEAMLINES
順応型フィードフォーワード制御による偏光スイッチング型アンジュレータが引き起こす軌道変動の抑制
Adaptive Feedforward Control for Suppression of Orbit Fluctuation Caused by Fast Helicity-Switching Undulators
(公財)高輝度光科学研究センター 加速器部門 Accelerator Division, JASRI
- Abstract
- SPring-8蓄積リングには、高速キッカーシステムを搭載した偏光スイッチング型アンジュレータと呼ばれる挿入光源が実装されている。この偏光スイッチングのためのキッカー駆動が、蓄積リングの電子ビーム軌道に周期的な摂動を与え、その結果、光源の安定度が劣化してユーザー実験の支障となっていた。この問題を解決するために加速器グループでは、順応型フィードフォーワード制御(Adaptive Feedforward Control)による新たな軌道補正システムを導入した。これにより、キッカーの駆動を実験ユーザーが気付かないレベルにまで、軌道の安定状態を保持することができるようになった。本稿では、この新しい軌道補正システムの概要を紹介する。
1. はじめに
SPring-8蓄積リングに設置されている高速偏光スイッチング型アンジュレータは、ID23とID25の2台である。それらは図1に示すようなツインヘリカルアンジュレータシステム[1,2][1] T. Hara et al.: J. Synchrotron Rad. 5 (1998) 426-427.
[2] T. Hara et al.: Nucl. Instrum. Methods Phys. Res. A 498 (2003) 496-502.となっており、右回り円偏光と左回り円偏光を生成するヘリカルアンジュレータがそれぞれ上下流に並んでタンデム配置されている。右回り、左回りの円偏光スイッチングは、5台の高速キッカーを用いて電子ビーム軌道に動的な局所バンプ軌道(図1のOrbit bump AとOrbit bump B)を生成し、それらを周期的に切り替えることで実現している。スイッチング周波数は、ID23については1 Hz、ID25については1 Hzまたは0.1 Hzである。電子ビーム軌道がOrbit bump Aにスイッチされている時、上流側アンジュレータからの右偏光放射光は水平に軸外しとなり、フロントエンドアブソーバーにより止められる。一方、下流側アンジュレータからの左偏光放射光はビームライン光軸に沿って伝播し、実験ステーションまで到達する。電子ビーム軌道がOrbit bump Bにスイッチされている時は、状況は逆となる。このように2つの軌道AとBを交互に切り替えることで、実験ユーザーに左右円偏光の放射光を交互にスイッチして提供している。軌道AとBにおける放射光ビームの空間的な分離角は、ID23については300 μrad、ID25では100 μradである。

図1 ツインヘリカルアンジュレータシステム
局所バンプ軌道A及びBは、IDセクションの中だけで閉じているのが理想的であるが、実際には高速キッカーにキック誤差があるため、その外側の軌道にも若干漏れ出している。このバンプ軌道の漏れによる軌道変動を補正するために、ID23及びID25セクションの両端には空芯コイルからなる高速補正ステアリング電磁石が設置されており、キッカー駆動と同期したフィードフォーワード軌道補正が、挿入光源グループによって元々実装されていた。しかしながら、このフィードフォーワード補正は、時間経過とともに補正精度が徐々に劣化し、キッカー駆動に同期した周期的な軌道変動が、補正テーブル調整後から次第に増加していく傾向にあった。いわば一度調整した補正テーブルがすぐに有効期限切れになってしまうような状況であった。この劣化の原因は挿入光源グループによって長年調査されてきたが[3][3] R. Kinjo et al.: Proceedings of PASJ (2018) 366-370.、様々な要因が複雑に関係しており、原因を取り除くには至らなかった。このような状況を解消するために、軌道補正精度劣化の原因除去は一先ず脇に置き、キッカー駆動による周期的軌道変動パターンを常時検出し、その変動パターンからフィードフォーワード補正テーブルを動的にアップデートする、いわゆる順応型フィードフォーワード制御(Adaptive Feedforward Control: AFC)による軌道補正システムの導入に舵を切った。この新しいAFC補正システムは加速器グループで開発され、現在ユーザー運転で実運用されている。このAFCシステムの詳細については、参考文献[4]の論文を参照して頂くとして、本記事では簡単に概要のみを紹介する。
2. 軌道補正スキーム
偏光スイッチングのための局所バンプ軌道は水平方向に生成されるため、キッカー駆動時に誘起される軌道変動の主成分は水平方向である。従って、AFCによる軌道補正は水平方向に対して適用している。開発したAFC補正システムは、キッカー駆動時のビーム振動パターンを高速BPMにより一定の時間間隔で測定し、そのビーム振動パターンを打ち消すためのID23及びID25両端の空芯補正ステアリングにフィードするカウンターキックパターンをリアルタイムに算出する。このカウンターキックパターンを元のフィードフォーワード補正テーブルに逐次加算して補正テーブルを動的にアップデートすることにより、キッカー駆動時でも軌道変動が抑制された状態を常時保持するものである。図2にAFC補正システムの全体概略図を示す。このシステムをうまく機能させるために、設計上考慮した点を以下に述べる。
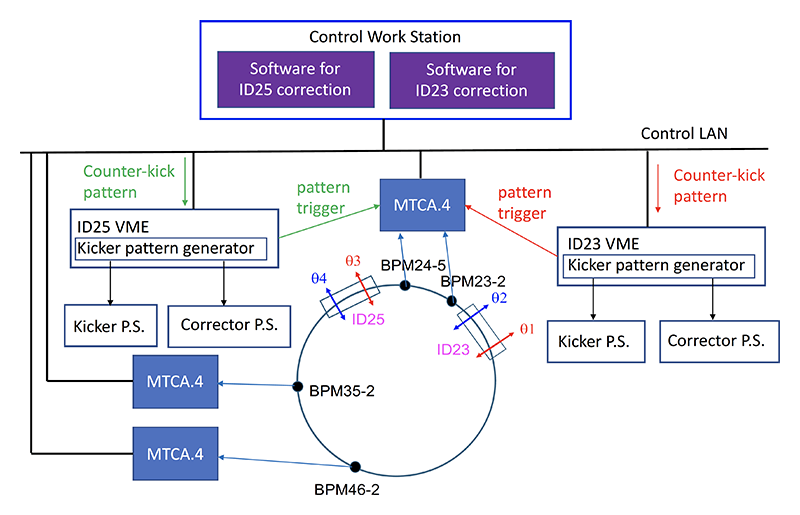
図2 AFC補正システムの全体概略図
1)高速BPM
軌道変動はキッカー駆動の繰り返し(1 Hz or 0.1 Hz)に同期して周期的に発生するが、1周期中の変動パターンには数十Hzの周波数成分が含まれている。従って、この変動パターンを正確に捉えるために、10 kHzの高速サンプリングレートでデータ取得が可能なMTCA.4ベースの専用BPM[5][5] H. Maesaka et al.: Proceedings of IBIC (2019) 471-474.をリングの4箇所に設置した。キッカー駆動に同期したBPMデータを取得するために、ID23及びID25用のVMEからそれぞれ独立に出力されるキッカーパターントリガー信号をMTCA.4のデジタイザーボードに入力し、制御ネットワークを介してそれらのパターントリガー信号の入力タイミングのタイムスタンプと4箇所のBPMデータを紐付けし、駆動に同期したデータを抽出する仕組みとなっている。
2)BPM配置
BPMの配置は、ID23及びID25でのエラーキックに対する応答が大きい場所、つまりキッカー駆動によるビーム振動の検出感度が高い(振動の腹に近い)場所を4箇所選択した。選択したBPMは、ID23でのエラーキックに対して感度が高いBPM23-2(23セルの2番目)とBPM46-2(46セルの2番目)、及びID25でのエラーキックに対して感度が高いBPM24-5(24セルの5番目)とBPM35-2(35セルの2番目)の合計4箇所である。また、選択したBPM間のベータトロン位相の関係は、ID23とID25のキッカーが同じ繰り返し周波数1 Hzで同時駆動している場合でも、それぞれに対するカウンターキックが分離よく抽出できる位相関係となっている。つまり、ID23に対して感度が高いBPM23-2、BPM46-2と、ID25に対して感度が高いBPM24-5、BPM35-2の位相差は、理想的な条件の直交関係に近くなっている。
3)データ処理
4台のBPMで測定されたビーム振動パターンから、ID23/25におけるエラーキックに起因する成分のみを高精度かつ効率的に抽出することも肝となる。BPMデータのランダムノイズが、計算されるカウンターキックの誤差に直結し補正性能をリミットしてしまうからである。従って、BPMデータのS/N比を向上させるための適切なフィルタリング処理が必須である。キッカー駆動による軌道変動は、駆動の繰り返しに同期した周期的変動という特徴を持つ。その周期性を利用して効率的に目的の振動成分のみを高S/N比で抽出する。そのためにまずキッカー駆動中のBPMデータを数十周期分取得し、それをFFT演算により周波数領域に変換する。その周波数スペクトルにはキッカー駆動の繰り返し周波数とそのハーモニクス周波数に応じたピークが現れる。これらピークは駆動により誘起されたビーム振動成分のみの情報を持っているので、高周波ノイズを除去するための適当なカットオフ周波数のローパスフィルター演算を施した上で、ピークのみを拾い上げて逆FFT演算し、時間領域に戻すことでS/N比が向上した1周期のビーム振動パターン(取得した周期数分のBPMデータが1周期の時間幅に折り畳まれ平均化されたパターン)が得られる。1 Hzでのキッカー駆動の場合、60周期分のBPMデータを取得しFFT演算をする。得られたFFTスペクトルに100 Hzカットオフのローパスフィルター演算を施し、1 Hzとそのハーモニクス周波数のピーク値のみを拾い上げ、逆FFT演算することにより、1周期長に折り畳まれたビーム振動パターンを得る。この振動を打ち消すためのカウンターキックパターンを計算し、ID両端に配置された空芯補正ステアリングにフィードする。これら一連の処理を一定時間間隔で繰り返すことで、軌道変動が抑制された状態を維持している。
3. 軌道変動の抑制とその効果
AFC補正の効果を示すために、ID23キッカーが1 Hz駆動している場合を例として取り上げる。図3は、2020年1月に実施したAFC補正のビーム試験において、ID23のギャップが15.3 mmの時に蓄積リング15セルアーク部のビーム振動監視用BPMで観測されたデータである。AFC補正適用前の状態では、キッカー駆動時の水平ビーム振動がpeak-to-peakで16 μm程度観測されていたが、AFC補正適用後には劇的にビーム振動が減少し、キッカー駆動時でも停止状態とほぼ同レベルにまで変動が抑制されていることが分かる。
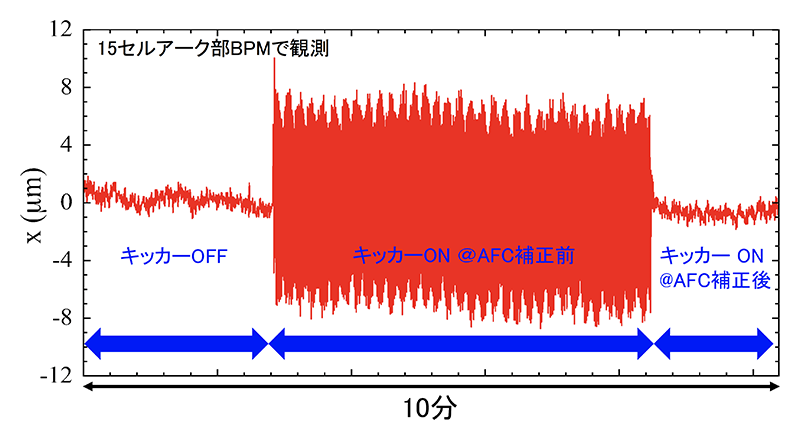
図3 ID23キッカー1 Hz駆動時に、15セルアーク部BPMで観測したAFC補正前後での水平ビーム振動。
このビーム振動を各ID光源点での振動レベルに相当する量に換算し、水平方向の光源位置変動と光軸角度変動(peak-to-peak)の推定値を求めたものを図4に示す。エラーキックのソースであるID23とのベータトロン位相の関係で、IDによって影響の度合いが異なるが、AFC補正適用前では光源位置変動が最大60 μm(p-p)、光軸角度変動が最大2 μrad(p-p)に達していたビームラインがあったと考えられる。この光源振動は、AFC補正によって1桁以上低減させることができ、かつその状態を常時維持することができる。ID25キッカー駆動においても、エラーキックとの位相関係により影響の大きいビームラインがID23の場合と異なるが、同様にAFC補正によって光源振動が低く抑えられることが確認できている。またID23とID25の両方のキッカーが同時に駆動している状況でも、このAFC補正がうまく機能することがビーム試験やユーザー運転中の運用において確認できている。
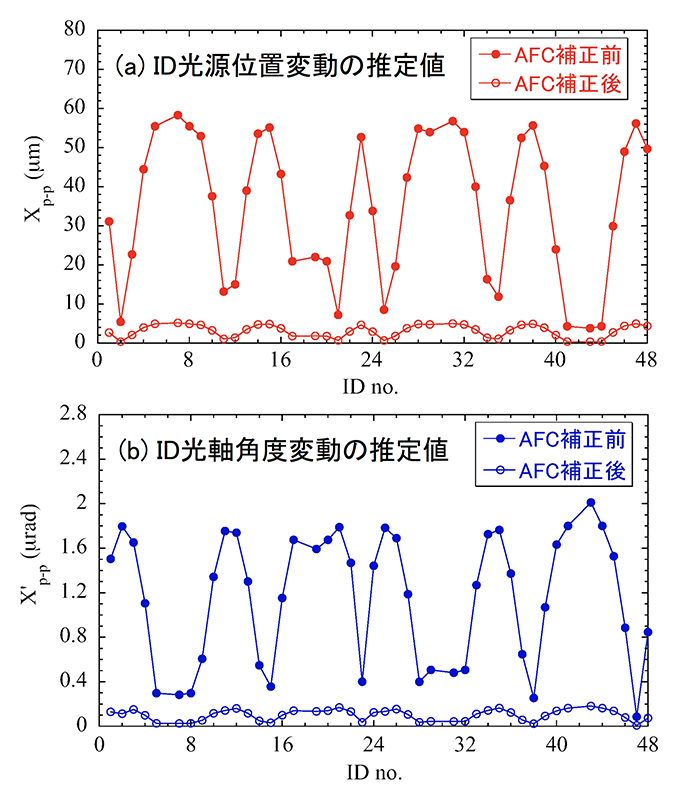
図4 ID23キッカー駆動時におけるAFC補正適用前後での各ID光源の水平振動(peak-to-peak)の推定値。(a)は光源位置変動、(b)は光軸角度変動を示す。
図4に示したAFC補正適用前のID光源位置変動及び光軸角度変動の大きさは、ID中心での水平方向の光源サイズ約1.3 mm(p-p)、アンジュレータ放射の典型的な角度発散(例えば、X線波長1 Å、ID長4.5 mの場合、13 μrad(p-p))に比べて十分に小さく、実験に支障をきたすレベルの変動ではないようにも思える。しかしながら、ビームラインに設置された狭いスリットを仮想光源に見立て、フレネルゾーンプレート(FZP)等の光学素子でX線を集光するような実験セットアップにおいては、光源の位置変動がFZP焦点面での光軸角度変動となって現れる。例えばID23キッカー駆動時に、図4(a)に示すように光源位置が60 μm(p-p)で変動した場合、実験試料上に入射するX線の光軸角度は、数μrad(p-p)のオーダーで1 Hz変動することになり、精密なX線散乱実験等の支障となり得る。AFC補正適用後には、この角度変動が1桁以上抑制され、実験に悪影響を与えないレベルに安定化された。
4. まとめ
開発された順応型フィードフォーワード制御(AFC)による軌道補正システムは、ユーザー実験の支障となっていたID23/25の偏光スイッチングキッカー駆動に起因する軌道変動の問題を解消し、ユーザーにその駆動をほとんど意識させないレベルまで軌道安定状態を保持できている。SPring-8-II等の次世代放射光源の性能を最大限に生かすためには、究極の軌道安定化が求められる。今回のケースのように、軌道変動を引き起こすエラーソースの場所とその特性が明確に分かる場合は、標的となるエラーキックをその直近で常時正確に打ち消すことができるAFCシステムを導入することで、高効率かつ高精度の軌道補正を実現することができ、次世代放射光源においても非常に有効な軌道安定化ツールの一つとして活用が期待できる。
参考文献
[1] T. Hara et al.: J. Synchrotron Rad. 5 (1998) 426-427.
[2] T. Hara et al.: Nucl. Instrum. Methods Phys. Res. A 498 (2003) 496-502.
[3] R. Kinjo et al.: Proceedings of PASJ (2018) 366-370.
[4] M. Masaki et al.: J. Synchrotron Rad. 28 (2021) 1758-1768.
[5] H. Maesaka et al.: Proceedings of IBIC (2019) 471-474.
(公財)高輝度光科学研究センター 加速器部門
(旧):(公財)高輝度光科学研究センター 光源基盤部門
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0886
e-mail : masaki@spring8.or.jp




