


Volume 20, No.1 Pages 116 - 119
3. SPring-8/SACLA通信/SPring-8/SACLA COMMUNICATIONS
分散制御フレームワークMADOCA IIをLabVIEWで
LabVIEW Components for Control Framework “MADOCA II”
(公財)高輝度光科学研究センター 制御・情報部門 Controls and Computing Division, JASRI
- Abstract
- 前号(Vol.19 No.4)にて、次世代SPring-8制御フレームワークMADOCA II(Message And Database Oriented Control Architecture II)について解説を行った。2014年にこのフレームワークを加速器制御に導入し、利用を開始した。複数のコンピューターを同期制御し、柔軟で堅牢な制御系を構築することができる。さらに、様々なOSや言語で動くように細心を払ってコーディングされており、Windowsもサポートする。これによりSPring-8ユーザー実験でも利用できる下地が整った。ユーザー実験ではLabVIEWによる計測プログラムが多く使用されている。そこで、LabVIEWからMADOCA IIを容易に利用できるように、VIライブラリの開発を行った。LabVIEWでSPring-8の光源制御システムや複数の実験制御コンピューターを連動させた高度な実験プログラムが開発できるようになる。
1. はじめに
挑戦的な実験を新しく始めるには、装置の開発に加えて、制御プログラムを開発することがほぼ必須である。小規模な実験であれば、1つのコンピューターに検出器やモーターの制御線を繋ぎ込み、1つのプログラムで制御できるだろう。しかし、1つのコンピューターに数多くの機器を繋ぎ込んで高度な実験を行うのには限界がある。しかも、設計が悪ければ、実験が変わる時にコンピューターに繋ぐ配線を変え、プログラムを全て変更する必要に迫られるだろう。
これを解決する方法として、分散制御がある。1つのプログラム(コンピューター)で制御する機器の数を少なくし、複数のプログラム(コンピューター)を協調させて、全体を制御するのである。さらに、機器制御プログラムと実験の手順をコントロールするプログラムに役割を分けて製作する。こうすれば、実験の変更時においては、実験手順のプログラムだけ変更すれば良い。分散制御はプログラム開発負担を軽減し、短期間で堅牢製と柔軟性を同時に兼ね備えた実験制御を構築する方法の1つである。
分散制御するフレームワークは幾つか存在する。前号(Vol.19 No.4)にて、解説したSPring-8制御フレームワークMADOCA II[1][1] T. Matsumoto et al.: "Next-Generation MADOCA The SPring-8 Control Framework", Proceedings of ICALEPCS2013, San Francisco, California, USA, (2013) 944.もその1つである。これはSPring-8を制御する400台以上のコンピューターを繋ぎ、安定的に運用できるレベルの堅牢製を持つ。これをユーザー実験で利用できるようになれば、実験プログラムの開発の負担を大きく軽減できる可能性がある。
SPring-8のユーザー実験制御ではLabVIEWがよく使われる。そこで、MADOCA IIを容易に利用できるようにするために、LabVIEW用のコンポーネント開発を進めている。その状況について報告する。
2. MADOCA II
MADOCA IIは分散制御フレームワークであり、複数のコンピューターが協調して動作するための通信規格でもある。下記の大きな特徴を持つ。
1)コンピューター間の通信メッセージには人間が読むことができる英語第5文型のS/V/O/Cに沿った文字列を使う。
2)制御対象機器には全てユニークなオブジェクト名(O)を付与する。
3)S/V/O/Cメッセージをフレームワークに送付すると、オブジェクト(O)を制御しているプログラムをフレームワークが探し出し、メッセージを伝達する。
4)コマンドのメッセージを送ると、必ず返事のメッセージが戻る。
5)メッセージに大きなサイズのデータを添付して送ることができる。
通信文字列は制御の専門家ではなく機器開発担当者に分かりやすいS/V/O/C形となっている。Sはメッセージを送ったアプリケーションを特定するためのもので、通常はフレームワークが自動的に設定する。MADOCA IIを使ったプログラムを作成する人はV/O/Cのみを考えれば良い。例えばBL25SUの挿入光源1のギャップを50.0 mmに設定するには、
put/bl_id25_gap_1/50.0mm
のように記述する。Vは動作を表し、putの場合は動作指令、getの場合は値取得になる。Oは操作対象機器名であり、ここではbl_id25_gap_1である。Cは操作内容であり50.0 mmの値を指定している。
図1にフレームワークの概略図を示す。MADOCA IIでは機器を制御するプログラムをEM2(Equipment Manager 2)と呼んでいる。メッセージを伝達するハブの役割をするサーバーがMS2(Message Server 2)である。MS2は常時起動しておく必要があり、パラメーターを与えると、別のコンピューター上のMS2へ接続する機能を持つ。
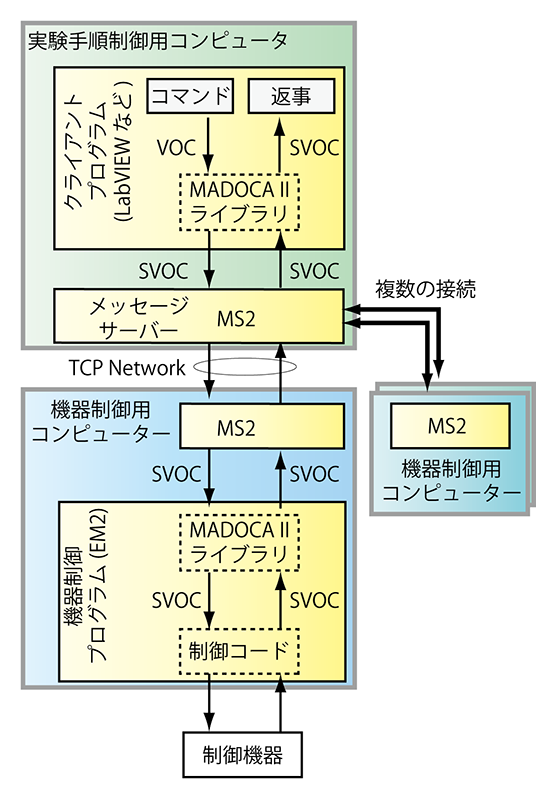
図1 MADOCA IIフレームワーク概略図
機器制御プログラム(EM2)を起動すると、内部のMADOCA IIライブラリはMS2に繋いで、制御している機器のオブジェクト名(O)を登録する。登録されたオブジェクトのリストは接続した複数のMS2で共有される。
実験手順がプログラムされたクライアントを起動すると、MADOCA IIライブラリは同様にMS2に接続する。ここでV/O/Cのコマンドをライブラリに送ると、オブジェクト(O)を制御している機器制御プログラム(EM2)へと、メッセージを届けてくれる。EM2は届いたメッセージを解釈した後、返事をMS2に送出する。返事も自動的に伝達されてコマンド発行元に戻る。
さらに、S/V/O/Cメッセージに添付して大きなデータを送ることができる。添付データの構造は、ファイルシステムのようなデータ構造となっていて、データに対して、キー名(ファイル名のようなもの)を設定して格納できる。さらにフォルダーを作成することもできるため、複雑な構造を持つデータをそのまま送れる。コンピューターで使われるほぼ全てのプリミティブ型とその配列(文字列、整数、浮動小数点数、整数配列、浮動小数点配列)をサポートとする。これにより、複数のスペクトル、測定条件、画像や文字列など、巨大なデータを1つのメッセージで送ることができる。
3. LabVIEWコンポーネント開発
前述のようにSPring-8ではLabVIEWが実験制御で多用されている。したがって、LabVIEWをMADOCA IIフレームワークと接続できれば大きな恩恵を得ることができる。そこで、MADOCA IIのLabVIEWコンポーネントのプロトタイプを2013年度に開発した[2][2] Y. Furukawa et al.: "MADOCA II Interface for LabVIEW", Proceedings of ICALEPCS2013, San Francisco, California, USA, (2013) 410.。MADOCA IIで使用されているZeroMQなどのライブラリは、VIライブラリも提供されており、これを用いてLabVIEWでMADOCA IIの動作をプログラミングした。このプロトタイプにより、LabVIEWでの動作検証や通信性能などを確かめることができた。反面、VIで開発する難しさも浮き彫りにした。MADOCA IIは、C/C++言語で開発されている。C/C++のライブラリが変更されると、VIもそれにならって、プログラムを改修しなければならない。この実装作業は二度手間であり、多くの時間とコストを消費する。そこで、2014年度は製作方針を転換した。C/C++言語でLabVIEW用のダイナミックリンクライブラリ(DLL)を開発し、LabVIEWからはそのDLLの関数を呼び出すだけの構成にした。MADOCA IIの内部動作はDLL関数が処理する。これにより、LabVIEWのプログラムは内部処理を気にすることなく、実験手順のプログラミングのみに専念できる。また、MADOCA IIの内部動作仕様が変更されても、新しいバージョンのDLLに差し替えるだけで、バージョンアップできる。
この方針を元にLabVIEWが利用できる形のDLL関数群の設計と開発を行った。また、LabVIEWの開発ターゲットは、このライブラリを長期間利用する観点から、現時点での最新版(2014)を選んだ。
LabVIEWのプログラミングをイメージしていただくために、提供予定の主なVIを下記に示す。ただし、開発中であるので、仕様が変更される場合がある点についてはご了承いただきたい。
![]() MS2_OPEN
MS2_OPEN
メッセージサーバー(MS2)に接続する。
![]() MSG_BUILD_INIT
MSG_BUILD_INIT
メッセージを初期化する。
![]() MSG_BUILD_INF
MSG_BUILD_INF
メッセージのV/O/Cを設定する。
![]() MSG_BUILD_VALUE
MSG_BUILD_VALUE
メッセージに添付するデータのキーと値のペアを設定する。データは文字列、整数、浮動小数点など複数の型をサポートする。
![]() MSG_BUILD_ARRAY
MSG_BUILD_ARRAY
メッセージに添付するデータのキーと配列のペアを設定する。データは複数の型をサポートする。
![]() MSG_BUILD_OPENCHILD
MSG_BUILD_OPENCHILD
メッセージの添付データに子フォルダーを作り、そこに移動する。
![]() MSG_BUILD_CLOSECHILD
MSG_BUILD_CLOSECHILD
メッセージの添付データの作業中の子フォルダーを閉じて、親フォルダーに移動する。
![]() MSG_CLIENT_SENDRECV
MSG_CLIENT_SENDRECV
メッセージをMS2に送り、返事を受け取る。
![]() MSG_FETCH_INF
MSG_FETCH_INF
返事のメッセージからV/O/Cを読み取る。
![]() MSG_FETCH_VALUE
MSG_FETCH_VALUE
キーを指定して、返事メッセージに添付された値を読み取る。
![]() MSG_FETCH_ARRAY
MSG_FETCH_ARRAY
キーを指定して、返事メッセージに添付された配列を読み取る。
![]() MSG_FETCH_OPENCHILD
MSG_FETCH_OPENCHILD
返事メッセージに添付されたデータの子フォルダーに移動する。
![]() MSG_FETCH_CLOSECHILD
MSG_FETCH_CLOSECHILD
添付データの作業中の子フォルダーを閉じて、親フォルダーに移動する。
![]() MS2_CLOSE
MS2_CLOSE
MS2との接続を終了する。
上記のVIを用いた、カメラ画像を取得するクライアントプログラムの例を図2に示す。カメラ画像を提供する機器制御プログラム(EM2)がMS2にすでに接続されている状況を想定している。このEM2が提供するカメラのオブジェクトの名前(O)は、“camera”である。このプログラムを実行すると、MS2に接続してcameraに対して初期化コマンド(put/camera/init)を送り、続いて、画像取得コマンド(get/camera/acquire_image)を送る。その返事には測定条件や、画像データが添付される。画像の幅(image_width)や高さ(image_height)を、対応するキーを指定して取得し、画像データはimage_dataをキーにして配列を得る。この配列を2次元配列に変換して、2DPictureに送って、表示する仕組みである。最後にMS2への接続を閉じるVIが呼び出される。このように、機器制御やデータ転送を含む分散制御が、MADOCA II − LabVIEWの連携によって柔軟に実現できるようになる。

図2 カメラ画像取得するクライアントプログラムの例
4. まとめ
容易な手続きでMADOCA IIフレームワークの様々な関数群を利用できるようなVIライブラリの設計を行った。クライアント用のVI群を紹介したが、LabVIEWで機器制御プログラム(EM2)も開発できるVI群も同時に開発している。2015年度からの利用を見込んでおり、これから数年かけて機能向上を図っていく予定である。
また、余談になるが、開発したDLLはLabVIEWだけでなく他の言語からも呼び出すことができる。C/C++言語はもちろんのこと、Pythonなどのスクリプト言語にも対応する。すでに、幅広い応用が期待されている。
参考文献
[1] T. Matsumoto et al.: "Next-Generation MADOCA The SPring-8 Control Framework", Proceedings of ICALEPCS2013, San Francisco, California, USA, (2013) 944.
[2] Y. Furukawa et al.: "MADOCA II Interface for LabVIEW", Proceedings of ICALEPCS2013, San Francisco, California, USA, (2013) 410.
(公財)高輝度光科学研究センター 制御・情報部門
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0930
e-mail : matusita@spring8.or.jp
(公財)高輝度光科学研究センター 制御・情報部門
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-1026
e-mail : furukawa@spring8.or.jp
(公財)高輝度光科学研究センター 制御・情報部門
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0980
e-mail : matumot@spring8.or.jp




