


Volume 27, No.4 Pages 345 - 348
2. ビームライン/BEAMLINES
BL02B1における単結晶構造解析測定の自動化に向けた開発の現状
Current Status of Development Toward Automation of Single Crystal Structure Analysis Measurement at BL02B1
[1](公財)高輝度光科学研究センター 放射光利用研究基盤センター 回折・散乱推進室 Diffraction and Scattering Division, Center for Synchrotron Radiation Research, JASRI、[2]近畿大学 理工学部 理学科 化学コース Department of Science, Faculty of Science and Engineering, Kindai University
- Abstract
- SPring-8単結晶構造解析ビームラインBL02B1では、高エネルギーX線を活かした電子密度レベルの精密構造解析が可能である。BL02B1では、大量の試料を高速に測定するハイスループット測定の需要が高まっており、単結晶構造解析測定の全自動化に向けて開発を進めている。多種多様な試料や実験条件に対応するため、試料環境や試料形状に依存しない自動測定システムの開発に取り組んでいる。測定の全自動化のためには、①試料の搬送と回折計への取り付け、②回折計の回転中心への単結晶試料の位置調整、③回折計の自動制御の3つを行うためのプログラムがそれぞれ必要となる。本稿ではこれら3つについての開発の現状について紹介する。
1. はじめに
SPring-8単結晶構造解析ビームラインBL02B1では、高エネルギーX線を活かした電子密度レベルの精密構造解析が可能である。BL02B1は、無機物質のみならず有機物質も含めた多種多様な試料が測定可能であり、一片が10 μm未満の大きさの微小単結晶(BL40XU EH2の対象)やタンパク質結晶(BL41XU、BL45XU)以外の単結晶構造解析を一手に引き受けている。また、BL02B1ではその場観察測定のため、電場印加や光照射等、様々な試料環境の制御が可能である。さらに、BL02B1の回折計は、4軸(いわゆるχ-φ-ω-2θの4軸)を有することから広い逆格子空間をカバーできる。これにより、結晶構造データベースへの登録時に求められているCompleteness、すなわち、格子体積、対称性、2θの最大値に対して期待される全反射数の充足率を達成できる。
BL02B1では、大量の試料を高速に測定するハイスループット測定にニーズがある。上述した①様々な試料に対して測定が可能であること、②試料環境の制御が可能なこと、③十分なCompletenessを達成するために4軸を独立に動かせること、の3点を維持したまま測定を全自動化することを指針として、開発を進めている。BL02B1では形状や色が大きく異なる様々な試料を測定対象とするため、試料位置の自動調整機構は、試料形状に依存しないことが望ましい。また、試料環境の制御ができ、かつ十分なCompletenessを達成するためには、試料周囲のスペースを制限せず、フレキシブルに動作を設定できた方が都合がよい。
以上を踏まえ、我々は試料環境や試料形状に依存しない自動測定システムとして、人型の協働ロボットを活用して試料を取り付け、回折像を利用して試料位置を調整する全自動測定システムの構築に取り組んでいる。試料環境や試料形状に依存しない自動測定システムは、BL02B1においてのみならず、放射線計測分野におけるオートメーション化に大きな役割を果たすと期待できる。
本稿では、①自動試料交換ロボット制御プログラム、②自動センタリング制御プログラム、③回折計制御プログラムの3つの開発状況について紹介する。
2. 自動試料交換ロボット制御プログラムの開発
試料交換を人間が行う場合、実験ハッチへのX線入射を止めてから試料交換を行う必要がある。協働ロボットが2重扉を通して試料交換を行えば、この手順を省略でき、ハイスループット化が期待できる。このアイデアに基づき、我々は協働ロボットを用いた試料交換の実現に向け開発に取り組んでいる。
BL02B1には協働ロボットが2体あり、1体はハッチ外からハッチ内へ試料トレイを受け渡すもの(図1(a))、もう1体はハッチ内で試料を交換するものである(図1(b))。どちらのロボットも2つの目と腕を有し、トレイ中の試料の有無を判断し、両手を駆使して試料をトレイから出し入れできる。このトレイには現在ユーザーが使用しているマイクロマウントと同型のものが25個セットできる(図1(c))。我々は、トレイをハッチ内に搬送するために、新たに2重扉ダクトを開発した。これにより、ハッチ外のロボットが外扉を開けてトレイをセットし外扉を閉めると、ハッチ内のロボットが内扉を開けてトレイを受け取るという一連の作業がX線を出したまま行えるわけである。この仕組みは、我々の知る限り他の施設では実現できておらず、ハイスループット化に向けた本システムの長所である。試料がセットされたトレイをハッチ内のロボットが受け取ると、ロボットは指で器用に試料をつまみ、回折計に取り付ける。
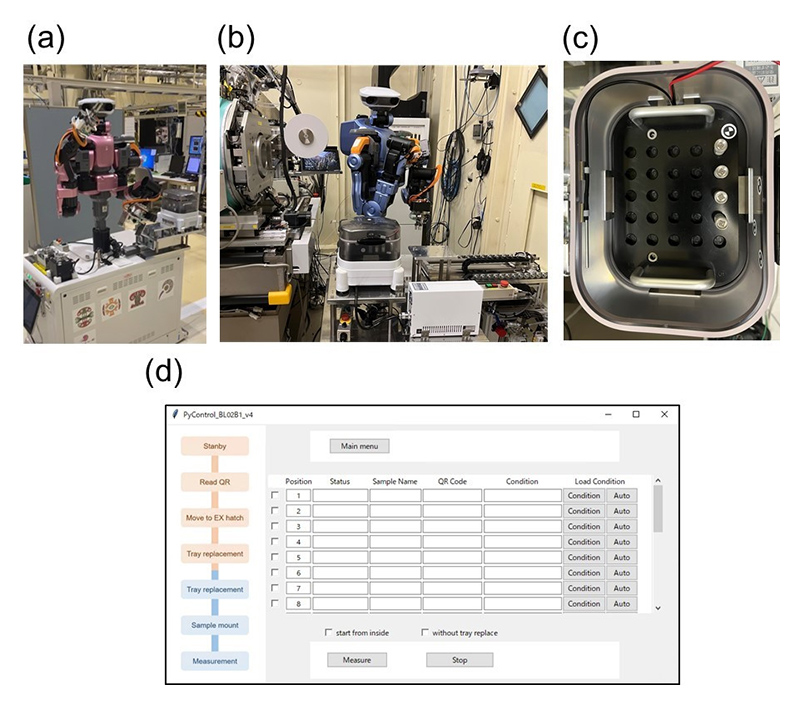
図1 (a)ハッチ外ロボット (b)ハッチ内ロボット (c)試料用トレイ (d)ロボット制御プログラム
ハッチ内外のロボットを制御するためのプログラムを、Python3を用いて開発中である(図1(d))。本プログラムでは、試料番号の指定、次の動作への移行のタイミングなどを制御している。
ハッチ外のロボットは、トレイ受け取り時に、マイクロマウント裏面のQRコードを読み取ることで、試料の識別コードを取得する。本プログラムでは、読み取った識別コードを測定ファイルに自動で保存する。
ハッチ内のロボットは、プログラムからの指示に従い、自由自在に動作する。実際の実験時には、ある試料を予備測定し、あまり良質でない試料であった場合には測定をスキップするような使い方が想定される。そのため、ハッチ内のロボットの制御時には、単に試料番号1から25まで連続的に測定するだけでなく、リアルタイムに次の動作を変更できるようなフレキシブルさが要求される。本プログラムでは、測定を行う試料にチェックを入れると、その試料のみをピックアップし、測定を行うようにしている。現在、ロボット単体での制御方法は確立し、後述する自動センタリング制御プログラムおよび測定プログラムとの連携を進めているところである。
3. 自動センタリング制御プログラムの開発
BL02B1では試料のセンタリング(回折計の回転中心に単結晶試料の位置を調整する作業)を手動で行っている。実験ハッチ内に立ち入っての作業が必要なため、実験ハッチを開けてセンタリングをし、実験ハッチを閉めるという一連の作業の分、時間を浪費してしまう。また、センタリングの手作業にかかる時間は、ユーザーの測定への習熟度によって変わってくる。新規ユーザーに対してもユーザーフレンドリーなビームラインを実現するためには、この工程は自動化することが望ましい。
測定システムのハイスループット化に向けて、自動センタリング制御プログラムを開発した(図2(a))。初めにCCDカメラとXYZ電動ゴニオメータヘッド(図2(b))を回折計に設置した。次に、Python3を用いて、CCDカメラとXYZ電動化ゴニオメータヘッド、およびω軸ゴニオメータと通信し、カメラの画像を見ながらXYZ-ω軸方向に移動するためのユーザーインターフェースを作成した。次に、表示されたカメラ画像をクリックすることで、クリックした箇所がカメラ中心にくるよう移動する機能を実装した。
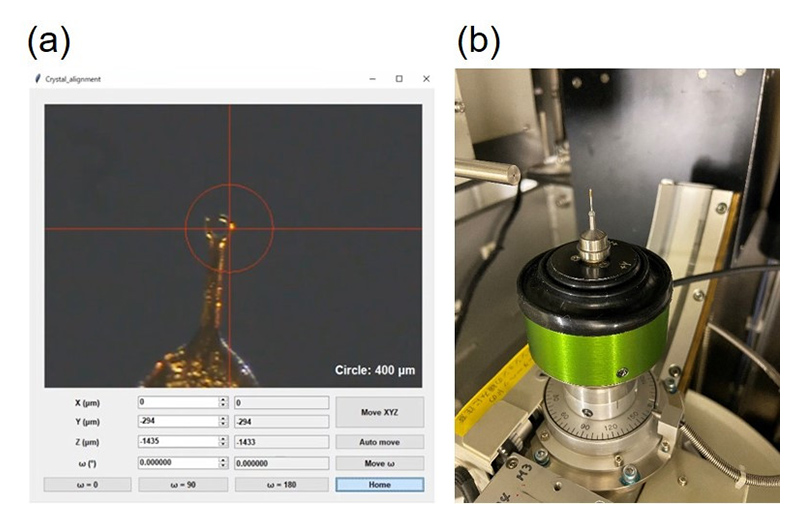
図2 (a)自動センタリング制御プログラム (b)電動ゴニオメータヘッド
測定の自動化に向け、画像認識を用いた自動センタリング-粗調整プログラムを開発した。CCDカメラによって取得した画像を色相、彩度と明度でフィルタリングすることで2値化した。これにより、ポリイミド製マイクロループの概形を画像認識し、その頂点に対してセンタリングするように自動化した。さらに、単結晶がカメラ中央に来るように自動で微調整するためのプログラムを開発した。BL02B1では、形状や色が大きく異なる多種多様な試料を測定対象とする。そのため、試料形状の画像認識ではなく、試料からの回折像を用いてセンタリング制御する手法を採用した。自動で回折像を取得した後、得られた回折像から回折強度を取得し、回折強度が最大となるよう単結晶位置を調整した。その結果、回折像を用いてのセンタリング制御機能を実装することができた。これによって、画像認識では概形取得が困難な小さな結晶や、形状のはっきりしない結晶に対しても自動センタリングすることが可能となった。
現状の自動センタリング制御プログラムでは回折画像のファイル転送等、内部処理に時間がかかり、習熟したユーザーの手作業のセンタリングよりも高速に実行できるとは言いがたい。今後高速化のためにアップデートしていく予定である。一方で、画面上で結晶位置をクリックすることでセンタリングを行う機能については、現段階でも手作業よりも直感的に、高速にセンタリングすることが可能であるため、段階的にユーザーへの提供を進めていく予定である。
4. 回折計制御プログラムの開発
これまで、装置制御にはメーカー提供のプログラムを利用していた。このプログラムでは装置制御用サーバーにコマンドを送ることで、専用コントローラーを通じて回折計を操作するが、そのままではロボット制御プログラムや自動センタリングプログラムと連携をすることが困難であった。そのため、Python3を用いて新たに測定プログラムを開発した(図3)。新しいプログラムでは、これまで搭載されていなかったソフトウェアリミット機能を実装することで、実験条件の誤入力による装置エラーの可能性を排除し、安全性を向上させた。本プログラムでは、回折計の制御、検出器の制御および単結晶構造解析のために必要な種々のファイルの生成を行うことができる。
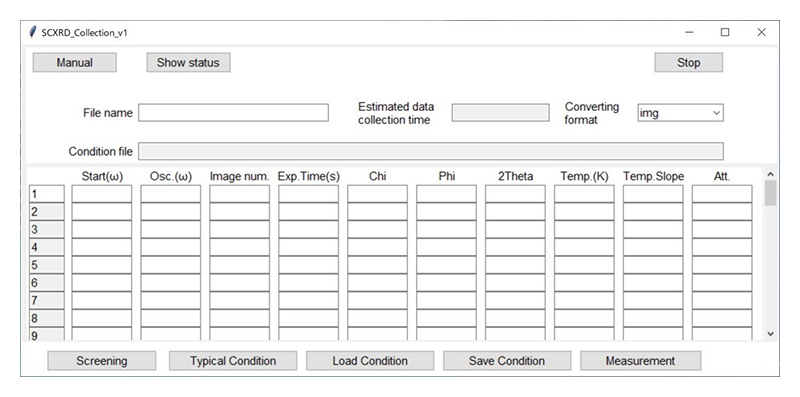
図3 新たに開発した回折計制御プログラム
本プログラムは既にユーザー開放しており、ユーザーの声を受けて随時アップデートをしている。現状では、回折計付属のサーバーにコマンドを送る部分を本プログラムの機能としているが、将来的には回折軸のコントローラーを、より安定かつ高速に動作する汎用パルスモータコントローラーとSPring-8標準のモータードライバーに置き換える予定である。
5. 最後に
SPring-8単結晶構造解析ビームラインBL02B1において、全自動ハイスループット単結晶構造解析測定システムを鋭意開発中である。最終的には、クリーンブース内でサンプリングした試料をトレイにのせ、ブース脇に待機しているロボットに受け渡せば、試料の搬送、結晶性のスクリーニングまでを自動で完了し、ユーザーは本測定を行う試料番号を指定するだけで一連の測定が完了するような全自動測定システムを構築したい。ロボット制御プログラム、測定プログラム、自動センタリング制御プログラムと個別に開発を進めており、それぞれについて段階的にユーザーへの提供を進めていく予定である。測定プログラムについては2022A期から提供を開始しており、自動センタリング制御プログラムについては2022B期から提供予定である。将来的には、リモート測定の可能性を視野に入れて開発を進めていきたい。
謝辞
自動試料交換ロボット制御プログラムの開発にあたり、グローリー株式会社の樽尚道氏、長澤正行氏、木戸健司氏、川﨑健司氏、理化学研究所の溝曽路次雄氏には多大なるご支援・ご助力をいただいた。ここに感謝の意を表す。自動化システムの開発にあたっては、BL02B1においてインハウス課題2020A2133、2021A2085、2021B2075、2022A2078に基づいて行った。
(公財)高輝度光科学研究センター
放射光利用研究基盤センター 回折・散乱推進室
〒679-5198 兵庫県佐用郡佐用町光都1-1-1
TEL : 0791-58-0833
e-mail : ynakamura@spring8.or.jp
近畿大学 理工学部 理学科 化学コース
〒577-8502 大阪府東大阪市小若江3-4-1
TEL : 06-4307-5099
e-mail : sugimoto@chem.kindai.ac.jp




