


Volume5 No.2
SPring-8 Section B: Industrial Application Report
BL14B2における遠隔XAFSシステムの構築 (3)Development of Remote-XAFS System at BL14B2 (3)
(公財)高輝度光科学研究センター
JASRI
- Abstract
-
BL14B2において開発を進めている遠隔XAFSシステムの基盤であるMADOCAがMADOCA2に移行したのを受けて、遠隔XAFSシステムの中核技術である汎用モータ1軸スキャンプログラム「singlescan」のMADOCA2への移行を行った。また、遠隔実験用「動作制限ユニット」を介した、外部ネットワークからのBL機器の操作テストを行い、試料自動搬送ロボットの遠隔制御に成功した。
キーワード: 遠隔実験、XAFS
背景と研究目的:
産業利用推進室では、制御・情報部門との協力体制のもと、BL14B2のXAFS自動化技術を基盤として、インターネット経由でXAFS測定を可能にする「遠隔XAFSシステム」の開発を進めている。産業利用分野においては、人的、資金的、時間的資源上の制約から、ユーザー実験は少数の熟達した測定担当者が行い、実験結果を真に求めている試料提供者が実験に参加できず、その意見が実験進行にフィードバックされづらいケースが少なくない。遠隔XAFSシステムが完成すれば、ネット接続が可能な環境にいる限りどこからでも実験に参加することが可能となるため、試料提供者の意見のリアルタイムなフィードバックが可能となり、より商品開発に密着した高品質の実験結果の創出が期待される。
夏季停止期間において、BL14B2のBLワークステーションがMADOCA2(*)に移行したことを受けて、遠隔サーバをMADOCA2へ移行した。遠隔XAFSシステムの各プログラムは、従来のMADOCA上で開発されたものであるので、MADOCA2上での動作検証を行う必要がある。本課題では、遠隔XAFSシステムの中核技術である、汎用モータ1軸スキャンプログラム「singlescan」の動作検証を行った。加えて、同停止期間に導入された「動作制限ユニット」を介した、外部ネットワークからのBL機器の操作試験を行った。動作制限ユニットはBLインターロックの一部であり、光学ハッチおよび実験ハッチが共に正常閉の状態でのみBL機器の遠隔操作を許可することで、不慮の遠隔操作による事故を防止するためのものである。本課題は、動作不具合の発見と訂正、およびその後の動作検証のため、前半3シフト、後半3シフトとした。
方法と結果:
(前半3シフト)
singlescan は、制御・情報部門において開発されたマクロ言語「Command Interpreter (CI)」で開発されたものであり、CIも新たにCI2に移行したため、CI2とsinglescanのソースコードとの整合性の確認を行った。その結果、CI2のプロシージャ(サブルーチンに相当)内における while ループからの break 処理に不具合(特定のパターンにおけるセグメンテーション違反の発生)が確認され、これを訂正した。
動作制限ユニットを介したBL機器の遠隔制御は、OA-LANより行った。OA-LANは来所ユーザーが無線LAN等を介してアクセス可能なネットワークであり、OA-LANからBL機器を直接操作することはできない。BL機器はBL-USER-LANに接続されており、電子認証と動作制限ユニットを経由してのみ、OA-LANからの操作が可能となる(図1)。
クライアントPC上でウェブブラウザを立ち上げ、テスト用クライアントを実行し、無線LAN経由で遠隔サーバに接続した。制御対象は試料自動搬送ロボットの試料位置調整用LEDバックライトであり、LEDのon/off制御に成功した。
(後半3シフト)
前半3シフトにおいて発見された不具合を訂正し、動作検証を行った。不具合とは、モータ駆動において、指示した動作目標パルスに到達しているにも関わらず、ソフトウェアからは動作目標パルスの一歩手前でモータが停止したかのように見える現象であり、このためsinglescanは「モータの動作異常」と判断してしまい、以後の処理が続行不能となる、というものであった。
モータコントローラユニットとsinglescanとの通信は、もう1つのサーバプロセス「pm16cem」を介して行われるが、調査の結果、このpm16cemのポーリングロジックに不具合があることが判明した。不具合を訂正し、本3シフトでは200回以上の繰り返しテストをパスする安定性を得た。
今後の予定:
singlescanのMADOCA2への移行が完了したので、今後はこれを利用する自動光学調整プログラム「Auto-Optics」、試料自動搬送ロボット「Sample Catcher」のMADOCA2への移行を進める予定である。
また、今回の遠隔操作テストにおいては、クライアントPCの環境が、Windows + Firefoxの構成でのみ接続認証が確認されている。今後は、他のOSおよびブラウザでの検証を進めなければならない。
(*) MADOCA, MAMDOCA2: SPring-8の加速器から光学ハッチ機器を制御しているフレームワーク。遠隔化においては、実験ハッチ機器をMADOCAの制御下に置くことがキー技術となる。
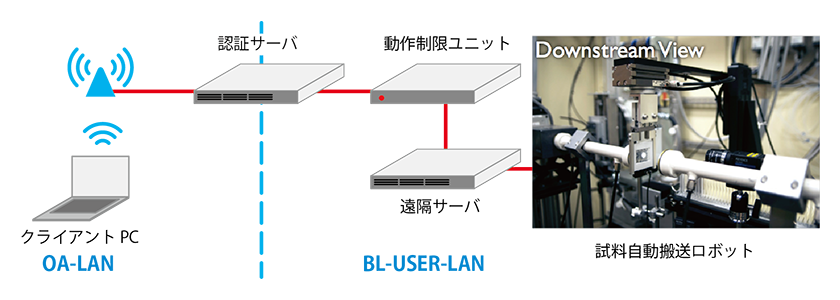
図1. BL機器の遠隔操作テストのレイアウト
ⒸJASRI
(Received: March 2, 2017; Early edition: April 25, 2017; Accepted: July 18, 2017; Published: August 18, 2017)
